微型姿态传感器


LPMS-BE-SM 是一款小型、低成本的惯性传感器模组,搭载高精度六轴惯性传感器芯片,特别适用于实现移动机器人室内导航、规划式行走、建图等功能。该模组集成了先进稳定的传感器算法,能有效降低惯性传感器长时间运行累积的角度误差,为客户提供精确的航向角数据。模组提供 UART 接口,广泛适用于各类嵌入式系统。
主要参数
| 型号 | LPMS-BE-SM |
|---|---|
| 尺寸 | 15.24 x 12.96 x 2.4mm |
| 重量 | 0.4 g |
| 通信接口 | UART |
| 欧拉角范围 | Roll: ±180°; Pitch: ±90°; Yaw: ±180°; |
| 解析度 | < 0.001°(Max.) |
| 航向角累计误差* | 10˚/hr (Typ.) |
| 陀螺仪范围 | ± 250 dps, 16 bits |
| 加速度计范围 | ± 2 g, 16 bits |
| 输出频率 | ~104 Hz |
| 输入电压 | 3.3 ~ 5.5VDC |
| 工作电流 | ≤11mA |
| 工作温度 | -20 ~ +70˚C |
| 存储温度 | -40 ~ +85˚C |
*标准测试条件下的典型值。结果随测试条件和测试机器的不同而有所变化。
上述标准测试条件为:
a)5m×4m的方形、平整测试场地;
b)稳定的室温;
c)测试机器位于水平地面上电后,不少于5min 的静止校准;
d)对称旋转,整个测试过程同向旋转累计不超过2圈;
e)测试过程中无人为干扰,且角速率、加速率未超过相应量程。
主要特征
- 基于 MEMS 传感器的小型惯性测量单元
- 集成高精度的三轴陀螺仪和三轴加速度计
- 运用稳定精确的六轴算法
- 实时输出三轴加速度、三轴角速率、欧拉角和四元数
- 低噪声
- 对于环境温度的高偏差稳定性
- 拥有高速波特率和数据输出频率的 UART 接口
- 主机配置要求低
- 低功耗
- PCB 集成度高
应用领域
- 扫地机器人
- 服务机器人
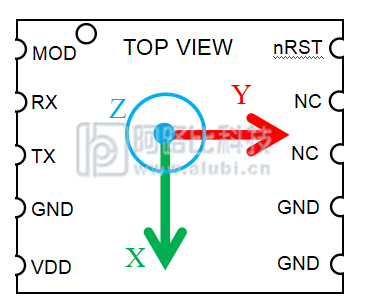
参考坐标系