利用 LPVR-CAD 和 VARJO XR-3 实现精确的混合现实技术
LPVR-CAD,VARJO XR-3 ,混合现实
博客,案例
利用 Varjo XR-3 锚定虚拟对象
要使混合现实体验具有吸引力和实用性,一个关键方面就是要将虚拟内容正确地固定在现实世界中。当用户戴着头显在场景中移动时,相对于现实世界固定位置和方向(姿势)的物体不应改变其姿势。想象一个简单的虚拟立方体,它被定位为坐在真实的桌子上。当用户四处走动时,无论用户从哪个角度观察,这个立方体都应保持原位。
更详细地说,虚拟对象与现实的正确锚定取决于以下几点:
1.为了在混合现实体验中创建正确对齐的内容,准确了解用户的头部姿势至关重要。我们使用LPVR-CAD计算头部姿态。
2.摄像头提供的视野与人眼的自然视野有很大不同。需要进行适当的校准来补偿这种影响。下图非常清楚地显示了视频穿透的固有问题。Varjo 的HMD经过出厂校准,可最大限度地减少这种效应对用户体验的影响。
为了更好地了解正确的光学透视(OST)校准对混合现实性能的影响,我们建议您使用Varjo 实验室工具中的摄像机配置选项。
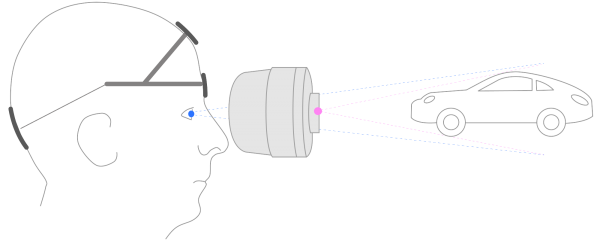

– 图片来源:Varjo 混合现实文档
磁共振性能的功能测试
我们的 LPVR 解决方案至少必须达到令用户典型应用满意的精度。因此,我们决定进行一系列实验,以评估我们的系统在混合现实体验中的精度,以及与 SteamVR Lighthouse跟踪的比较。
我们采用了以下配置进行评估:
| Lighthouse | 头显 | 引擎 | 跟踪系统 | VARJO 标记 |
| 1 | Varjo XR-3 | Unreal 5.2 | LPVR-CAD | 否 |
| 2 | Varjo XR-3 | Unreal 5.2 | Lighthouse | 否 |
| 3 | Varjo XR-3 | Unreal 5.2 | LPVR-CAD | 是 |
| 4 | Varjo XR-3 | Unreal 5.2 | Lighthouse | 是 |
1 – 无 Varjo 标记的LPVR 跟踪
在这个场景中,我们将一个简单的虚拟立方体固定在桌面上,并确定其位置和方向。立方体是这个场景中唯一的虚拟物体,其他一切都是通过 HMD 摄像机传输的实时视频。我们使用 LPVR-CAD 和ART Smarttrack 3 对 HMD 进行跟踪。没有使用标记来稳定立方体的姿态。
重要提示:如果没有正确调整连接到 HMD 上的标记目标,混合现实使用案例的跟踪性能会发生显著变化。请参阅LPVR-CAD 文档或联系我们获取进一步支持。
2 -无 Varjo 标记的 Lighthouse跟踪
这个场景的基本设置与场景 1 相同,只是我们使用了Lighthouse追踪技术来找到 HMD 的姿势。
3 – 利用 Varjo 标记进行 LPVR 跟踪
无论 HMD 本身的跟踪效果如何,只要通过视频直通馈送看到的环境失真没有得到完美补偿,现实和虚拟视图空间中的物体显示位置就会出现差异。由于这种光学透视校准(OST)的精度有限,另一种弥补其影响的方法是直接从视频馈送中获取有关环境的附加信息,并将物体与之对齐。
这种工具就是放置在图像中的 Varjo 标记,即 QR 码。通过图像分析,可以将虚拟对象固定在这些 QR 码上,从而在用户移动时自动与视频画面重新对齐。下面的视频展示了这一方案的结果。
4 – 利用 Varjo 标记进行Lighthouse跟踪
在最后一个测试场景中,我们做了与场景 3 相同的实验,只是用Lighthouse跟踪代替了 LPVR 跟踪。
结论
请参阅下面的表格,了解我们的初步发现:
| 1.5 | LPVR 跟踪 | LIGHTHOUSE 跟踪 |
| 无 Varjo 标记 | 2 | 2.5 |
| 有 Varjo 标记 | 1.5 | 1.5 |
—水平面大致位移误差(单位:厘米)
使用相同的房间设置和测试场景,LPVR-CAD 和 Lighthouse 追踪系统的混合现实精度相差无几。两种追踪系统都能根据头部的移动观察到1-2厘米的轻微偏移。进一步减少这种残余漂移的方法是使用Varjo标记,使虚拟对象与直通摄像机的视频信号进一步对齐。要实现 LPVR 跟踪的良好效果,需要精确调整头戴式耳机上的光学目标。
请注意,我们估算位移误差的方法是定性而非定量的。在这篇文章中,我们对 LPVR 和 Lighthouse 追踪技术(有无 Varjo 标记)进行了一般性比较。随后我们将进行更精确的定量评估。
对于希望尽可能减少漂移的客户,我们建议使用标记和光学跟踪。使用 Varjo XR-4 和其他不同的跟踪环境或显示内容可能会产生不同的结果,这需要在未来进行进一步测试。
内容由LP同事Marc Keen提供