高精度航向角传感器
LPMS-NAV3 RS422

防水IP67
【购买通道】
金属防水接头6轴数据有线传输型姿态传感器/陀螺仪:TTL、RS232、RS422、RS485或CAN+TTL
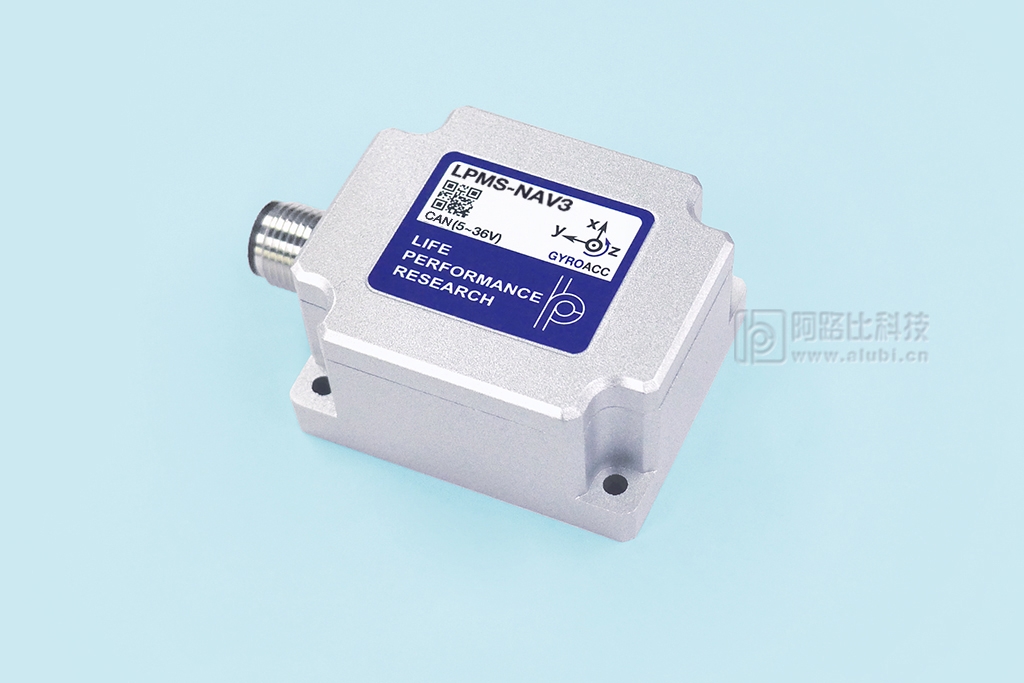
LPMS-NAV3 系列是基于 MEMS 传感器的高精度、高稳定性系列姿态传感器,其中航向角经本公司算法特别优化,能保证长时间内的稳定性,因此该系列产品适用于需要精确航向数据的机器人或移动平台应用。此外,该系列产品内嵌一功能强大的处理器,通过整合处理陀螺仪和加速度计等传感器数据,最终提供下列数据输出:原始数据(加速度、角速度等)、姿态角数据(欧拉角和四元数)、校准后的线性加速度和角速度以及温度数据。通讯方面,
LPMS-NAV3系列产品针对不同的应用提供以下五种通讯方式供选择:TTL、RS232、RS422、RS485或CAN+TTL。
主要参数
| 型号 | LPMS-NAV3 TTL | LPMS-NAV3 RS232 | LPMS-NAV3 RS422 | LPMS-NAV3 RS485 | LPMS-NAV3 CAN |
|---|---|---|---|---|---|
| 通信型号 | TTL | RS232 | RS422 | RS485 | CAN+TTL |
| 功耗* | 0.072 (0.006A@12V) | 0.084 (0.007A@12V) | 0.072 (0.006A@12V) | 0.072 (0.006A@12V) | 0.096 (0.008A@12V) |
| 最大波特率 | 921600 bps | 921600 bps | 921600 | 256000 bps | 1M bps |
| 通信协议 | LPBUS | LPBUS | LPBUS | LPBUS | CANOpen /SequentialCAN |
| 尺寸 | 50 x 42 x 25mm |
| 重量 | 106.8(±4)g |
| 欧拉角范围 | Roll: ±180°; Pitch: ±90°; Yaw: ±180°; |
| 解析度 | <0.01° |
| 加速度计参数 | 3-axis,±2/±4/±8/±16 g, 16bits |
| 加速度计静止零漂 | ±10mg |
| 加速度计静止温漂 | ±0.1mg/°C |
| 陀螺仪参数(X,Y) | X,Y-axis, ±125/±250/±500/±1000/±2000/±4000dps, 16bits |
| 陀螺仪参数(Z) | Z-axis, ± 400dps, 24bits |
| 陀螺仪静止零漂(X,Y) | ± 1dps |
| 陀螺仪静止温漂(X,Y) | ± 0.005dps/°c |
| 陀螺仪噪音密度(X,Y) | 0.005dps/√Hz |
| 陀螺仪零位公差(z) | ±1dps |
| 陀螺仪零位随温度变化(Z) | ±1dps |
| 数据输出类型 | 原始数据/欧拉角/四元数/线性加速度/温度 |
| 最大传输速率 | 500Hz |
| 系统电压 | 5V~36V DC |
| 连接接头类型 | M12 |
| 防水防尘等级 | lP67 |
| 外壳材料 | 铝合金 |
| 工作温度 | -20~80℃ |
主要特征
- 基于MEMS传感器的小型姿态传感器
- 集成高精度的三轴陀螺仪和三轴加速度计
- 运用稳定精确的算法进行设备上的航向角计算
- 实时输出:原始数据、欧拉角、四元数、线性加速度和温度等
- 低噪声
- 对于环境温度和外部振动的极高偏差稳定性
- 通信接口:TTL、RS232、RS422、RS485或CAN+TTL
应用领域
- 工业移动机器人
- 服务机器人