LPNAV-VAC——用于AGVS的低成本导航系统
LPMS-IG1,导航系统
案例,解决方案
简介
LP-RESEARCH为小型自动导引车(AGV)开发的LPNAV低成本导航系统取得了突破性的成果。LPNAV的重点领域之一是真空清洁机器人,该机器人需要对环境空间的了解,以便计算最佳清洁策略。由于真空清洁机器人主要是消费类设备,因此该市场的解决方案需要具有成本效益,同时还要保持最先进的性能。
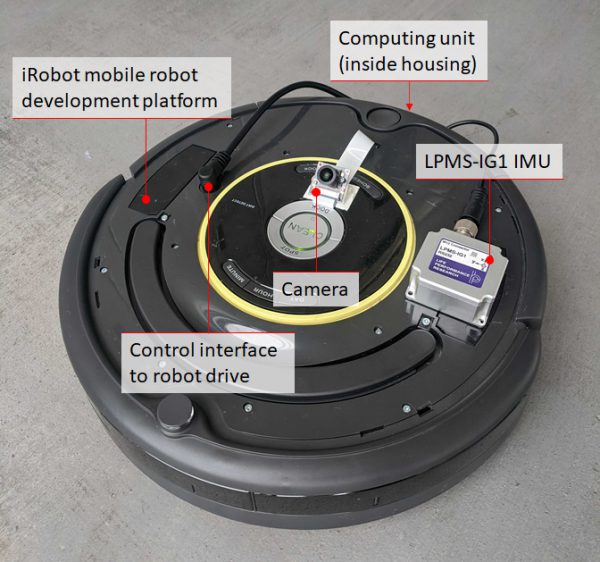

图1 LPNAV-VAC开发套件包含一个机器人平台、一个专用计算设备,一个IMU传感器和一个摄像头
开发平台
LPNAV-VAC组合了三种不同的数据源,以便计算机器人在房间内的位置:惯性测量单元、机器人车轮编码器的数据以及安装在机器人上的摄像机的视频图像(图1)。中央计算单元组合来自这些数据源的信息,以同时创建机器人周围环境的地图并计算机器人在室内的位置。
至关重要的一点是传感器融合算法必须能动态更新其正在构建的地图。当新的传感器信息到达时,地图将不断调整以反映机器人环境的最佳视图。
尽管某些机器人导航系统已确立了同步定位和地图绘制(SLAM)的原理,但这些解决方案往往依赖于激光扫描仪(LIDAR)或仅视觉重建。机器人中所有可用数据源的组合使LPNAV-VAC在使用低成本现成组件的同时创建环境的高清地图。
初次演示
在上面的演示视频中,LP-RESEARCH的同事和LPNAV-VAC的主要开发人员正引导他们的AGV设备穿过他们在东京的办公室一楼。屏幕右侧显示的是机器人摄像机视图和检测到的视觉特征,而右侧则显示了机器人在环境中的路径。随着机器人在房间中行走,将创建3D地图并不断进行更新。
请注意,机器人在转弯、经过过房间的小台阶或环境光线改变时都不会丢失跟踪。而且,视频中Thomas在镜头前四处走动也不会干扰LPNAV算法。
使用此地图和机器人的位置信息,路径规划算法可以找到最佳路径,以使机器人有效地打扫房间。
内容由LP同事ThomasHauth提供